-
2016���Ї��o���{��Ј��ռ��A�y��δ���lչ�������
2016/6/22 10:53:19����Դ:�Ї��a�I�lչ�о��W�������w���� �� С�����ղر��������ӡ�����P�]��
������ʾ��һ���o���{�lչ�śr�o���{���܇��һ�N������܇��Ҳ���ԷQ֮��݆ʽ�ƄәC���ˣ���Ҫ����܇�ȵ���Ӌ��Cϵ�y�����������{�x�팍�F�o���{����ɭ·֪�R�a���c�Ƽ�������@ʾ��2010�굽 2015���g���c��܇�o���{�g���P�İl����������һ���o���{�lչ�śr
�����o���{���܇��һ�N������܇��Ҳ���ԷQ֮��݆ʽ�ƄәC���ˣ���Ҫ����܇�ȵ���Ӌ��Cϵ�y�����������{�x�팍�F�o���{
��������ɭ·֪�R�a���c�Ƽ�������@ʾ��2010�굽 2015���g���c��܇�o���{�g���P�İl���������^22,000���������ڴ��^���У�������I�э�¶�^�ǣ��ɞ�ԓ�I����ИI�I���ߡ�
�����o���{�g��һ���漰��������Ӌ��C����ϢͨӍ���Ԅӿ��ơ�������λ���C��ҕ�X���˹����ܵȶ��T��ǰ�،W�ƵľC�ϼ��g�������o���{����ģ�K���Ɍ��o���{���P�I���g�֞飺�h����֪���g����λ�������g��·��Ҏ�����g�͛Q�߿��Ƽ��g��
�����h����֪���g��ͨ�^��N��������܇�v�܇��ĭh����Ϣ�M�и�֪���h����Ϣ���H������܇�v������B��Ϣ����܇�v�ٶȡ��D��ȡ�λ����Ϣ���A�ǡ����ٶȵȣ�߀�������ܭh����Ϣ�����·λ�á���·�����ϵK��λ�ú��ٶȡ���ͨ��־�ȡ�
������λ�������g��Ҫ������λ���g�͌������g����λ���g���Է֞�������λ�������݃x�����Ӌ�㣩���^����λ����GPS���ͽM�϶�λ���������g���Է֞���ڵ؈D�Č����Ͳ����ڵ؈D�Č�������T�Ԍ����������и߾��ȵ؈D�ڟo���{�Č��������P�I���á�
�o���{���P�I���g

����·��Ҏ�����g���Ԟ�o���{��ṩ�����܇·�����o���{�܇������^���У���܇·���Ĵ_������ζ���ϵK�·���D��Ȇ��}����Ҫͨ�^·��Ҏ�����g��ɡ����m�÷�����ͬ��·��Ҏ�����gͨ���ɷ֞�ȫ��·��Ҏ���;ֲ�·��Ҏ����
�����Q�߿��Ƽ��g�ஔ������܇�Ĵ��X����ͨ�^�C�Ϸ����h����֪ϵ�y�ṩ����Ϣ������ǰ��܇�v�О�a���Q�ߡ��Q���g߀��Ҫ���]܇�v�ęCе���ԡ��������ԣ��������Ŀ��Ʋ��ԡ����õěQ���g�ЙC���W�����W�j��ؐ�~˹�W�j��ģ��߉�ȡ������Q���g�IJ�ͬ������ϵ�y�ɷ֞鷴��ʽ������ʽ�;C��ʽ��
�o���{�g�lչ�v�̵��Ă��A��

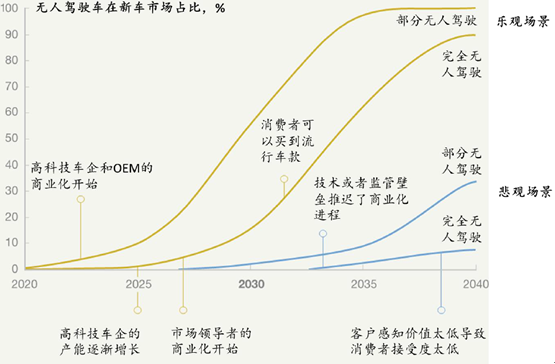
���������o���{��Ј��ռ��A�y
�����AӋ���֟o���{���2020 �������_ʼ�̘I������ȫ�o���{���2025 �������_ʼ�̘I�������ڴ�֮ǰ�����{��o��ϵ�yADAS ���l�]��Ҫ���á�
�������^��r�£��AӋ2030 �����܇�N���У���ȫ�o���{�܇ռ�ȼs15%�����֟o���{�܇ռ�ȼs50%��2015 ����܇�N�ۣ����֟o���{�ĝB���_��100%��2040 �����܇�N�ۣ���ȫ�o���{�ĝB���_��90%��
�������^��r�£��AӋ2040 �����܇�N���У���ȫ�o���{�܇ռ�ȼs10%�����֟o���{�܇ռ�ȼs30%���ڴ�֮ǰ���o���{���ռ�̎�ھ����������^���С�
���������O�ܡ���ȫ�ɿ��ļ��g��Q�����Լ����M�ߵĽ��ܶȺ�֧����Ը�ǟo���{��ܷ��ռ����P�I���ء�
�o���{��ռ��A�y
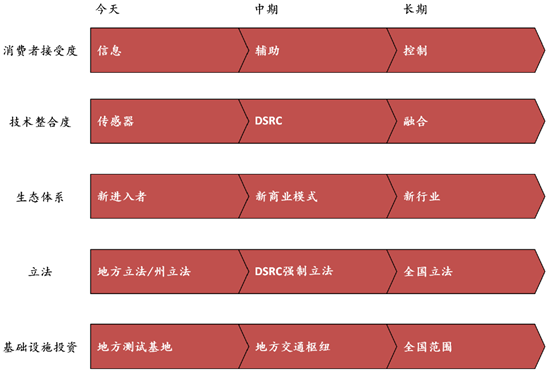
���������o���{�lչ����
�����o���{�����M��Ҫ���傀�S��ͬ�r�M�У����M�߽��ܶȡ����g���϶ȡ����B�wϵ�����������A�OʩͶ�Y�����ɻ�ȱ��
�������M�ߌ��o���{�Ľ��̶ܳȏ���Ϣ���o���{�������ƙཻ�o�o���{���g�İlչ�Ă�������DSRC�������g���ںϡ�
�������B�wϵ�ĸ��N���W��˾���M�뵽��u�a���µ��̘Iģʽ����K�lչ���µ��ИI���������棬�ĵط�����/����������DSRC ������������ȫ��������������
�������A�OʩͶ�Y���棬�ĵط��Ĝyԇ���أ����ط���ͨ�м~�Ľ��ܣ����ȫ�������Ļ��A�OʩͶ�Y��
�������ā������傀�S�ȵ����]����ǰ��l�������eǰ�M����K�γ��¼��g�����ИI�������B��
�o���{�ǰ�M���傀�S�ȣ����M�߽��ܶȡ����g���϶ȡ����B�wϵ�����������A�OʩͶ�Y
 �����������İ���wԭ�������У��D�d���H�����������Ϣ֮Ŀ�ģ������֙��О飬Ո��һ�r�gϵ�҂��Ļ�h�����]�䣺cidr@chinaidr.com��
�����������İ���wԭ�������У��D�d���H�����������Ϣ֮Ŀ�ģ������֙��О飬Ո��һ�r�gϵ�҂��Ļ�h�����]�䣺cidr@chinaidr.com�� -
- ���c�YӍ
- 24С�r
- ������
- ������
- ��e؛�\ä�^�L�U��G7�������ֻ��������ܰ�ȫ�ډ�
- �����Ϳ�x�ܷ��z���ۣ����̘I����������y�Ļ��ĬF�������_
- һ�l���a�I���ȡ���һ�����������ȡ� �ɶ��������l����ɫ�Lò��·�۳Ǵ����ӛ
- �����ɣ����̓r���Ǹ����������ͳɱ����������o�Ǻ�
- ؐ�J�ѹ�Ӣ���ؽM�W�������h���L���I��ϵ�y������ȫ�o�n
- ��ܛ���Г��Ŀ���x��2025��ȇ��ҙn���ֿƼ��Ŀ�M����Ŀ���Ρ�
- ������Ʒʡ�X�������Sģ�ͣ��������ؘ���^���������B
- ��늡���ƽ�����У��W�m������ȫ�����������η���
- �a���ں��Ӱ壡�ӱ���W�y�����Ƽ������������`�����c��������
- ��������Ƥ���������£�㼑г�M�@�����죡


��� | �Wվ��B | �P���҂� | �aƷ�c���� | �̘I���� | ����� | �������� | �̘I�YӍ | ϵ�҂� | ����朽� | �Wվ�؈D
���������������б����д��·ʮһ̖11̖�̄�4�ӡ��]����100141
�����\�I���ģ������н������g�_�l�^�P�Ƕ�·10̖��ؕr���V��C��12��
ȫ�����M��ԃ�ᾀ��400-680-5790 (7*24С�r�������ԃ�Ԓ��18411010258 ���棺010-58850975
�I����ԃ������17810330644�������� ����]����cidr#chinaidr.com(��#�Q��@) ����QQ��330291710
Copyright © 2009-2020 chinaidr.com, All Rights Reserved���a�I�lչ�о��W ������� �Wվ�䰸����ICP��11011445̖-2
���������������б����д��·ʮһ̖11̖�̄�4�ӡ��]����100141
�����\�I���ģ������н������g�_�l�^�P�Ƕ�·10̖��ؕr���V��C��12��
ȫ�����M��ԃ�ᾀ��400-680-5790 (7*24С�r�������ԃ�Ԓ��18411010258 ���棺010-58850975
�I����ԃ������17810330644�������� ����]����cidr#chinaidr.com(��#�Q��@) ����QQ��330291710
Copyright © 2009-2020 chinaidr.com, All Rights Reserved���a�I�lչ�о��W ������� �Wվ�䰸����ICP��11011445̖-2